是利用磁致伸缩材料的威德曼(Wiedeman)效应和威拉里(Villary)效应实现绝对位移的测量,它具有量程大、非接触、精度高、速度快、防护等级高、成本低等卓越特性,因而广泛应用于机械、建筑、机床等行业。
由于这种传感器是依靠电磁信号工作的,同时其直接测量量的感应信号的时候时间,所以在使用时会受到空间电磁场(包括移动磁铁组件)的电磁干扰的影响,导致测量线圈中引入各种不同规律的干扰信号(即电磁噪声),从而直接降低传感器的精度。因此,降低噪声是 必须解决的问题。
发明内容
针对上述现有技术中存在的缺陷,本发明提出一种具有补偿功能的 新原理和结构,抗干扰性能好、信噪比高。
为了实现上述目的,本发明所提出的具有补偿功能的 由磁铁组件和传感器本体两个部分组成。所述的磁铁组件活动于传感器本体外侧,保留一个固定的距离,并能沿传感器本体外壳的轴向方向移动。
所述的传感器本体内设有骨架、信号发生组件、测量电路、固定块以及外壳,所述的骨架和测量电路固定于插座上,固定块置于外壳内的远端,而信号发生组件固定于骨架上。所述的骨架上设有两个轴线相互平行的内孔,分别用于安装测量组件和补偿组件。信号发生组件有两个,分别称为测量组件和补偿组件。测量组件包括测量波导丝、测量线圈,补偿组件包括补偿波导丝和补偿线圈,测量线圈与补偿线圈的参数完全相同,测量波导丝与补偿波导丝长度不同,其他参数完全相同。[0010] 所述测量波导丝和补偿波导丝的两端中,靠近线圈的一端称为近端,另一端称为远端。测量波导丝的近端安装于所述骨架一个内孔中,近端经过激励导线电气连接测量电路,测量波导丝的远端安装于固定块上,并经过返回导线连接到测量电路中。补偿波导丝的近端安装于骨架的另一内孔中,补偿波导丝的远端悬空。
本发明的测量波导丝具有足够的长度,按照传感器的测量量程来确定,具体长度应大于量程,并留有一定余量。具体余量大小可根据实验测定后确定。而补偿波导丝的长度可以等于骨架的长度。两根波导丝的轴线相互平行。
本发明的测量线圈和补偿线圈分别同轴绕设于骨架上与本组件相对应的内孔的外周,两个线圈直接通过连接导线直接相连,两个线圈的另一端并通过测量导线以反向串联形式接入测量电路。
进一步的,所述的测量波导丝的外周均套有保护套管,保护套管的一端与骨架固接,另一端与固定块固接。所述的外壳的外壁装有插座,所述插座电气连接测量电路。
本发明实施例工作时,由测量电路产生的激励脉冲通过激励导线加载到测量波导丝上,从而产生一个垂直于测量波导丝轴线的环形磁场。该环形磁场以光速沿测量波导丝的轴向传递,当该环形磁场到达磁铁组件所在位置时,与磁铁组件产生的固有磁场相遇,二者的磁场矢量相叠加形成一个螺旋磁场,由此产生瞬时扭力,并在测量波导丝上形成一个机械扭力波。该扭力波以超声速度沿测量波导丝传递,在测量波导丝的近端该扭力波由测量线圈拾取后,转换为对应的感应脉冲。测量电路通过测量出激励脉冲与扭力波返回产生的感应脉冲之间的时间差,就可以精确地计算出磁铁组件与测量线圈之间的绝对距离,从而可以实现定位磁铁组件的绝对位移大小的测量。
由于本发明的测量线圈与补偿线圈的参数完全相同,测量波导丝与补偿波导丝长度不同,其他参数完全相同,所以在同一时刻测量线圈和补偿线圈受到外界空间的电磁干扰(例如:来自外部空间的电磁干扰,或由内部电源波动、波导丝振动等因素所产生的噪声)是完全相同的。由于测量线圈和补偿线圈是反向串联的,即二者构成差动形式,这将使得两个线圈的感应脉冲输出信号直接相减。因此,两个感应线圈输出的总输出信号中干扰与噪声会显著降低,从而显著提高检测精度和抗干扰能力。
附图说明
图1是本发明实施例的传感器结构组成示意图;
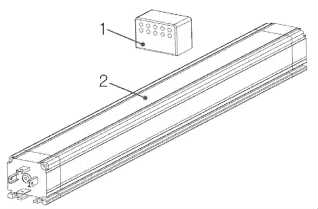
图2是本发明实施例的传感器本体结构组成示意图;
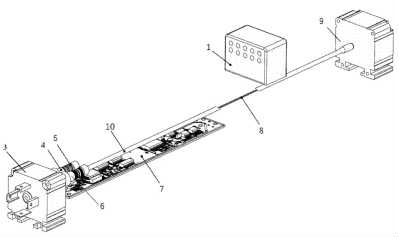
图3是本发明实施例的测量组件与补偿组件位置关系示意图;
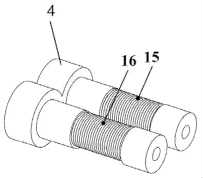
图4是本发明实施例的测量组件与补偿组件结构组成示意图;
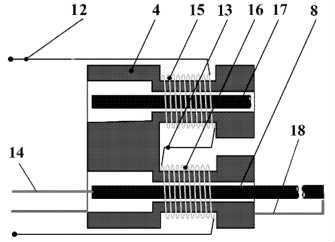
图中,1-磁铁组件,2-传感器本体,3-插座,4-骨架,5-补偿组件,6_测量组件,7-测量电路,8-测量波导丝,9-固定块,10-保护套管,11-外壳,12-测量导线,13-连接导线,14-激励导线,15-补偿线圈,16-测量线圈,17-补偿波导丝,18-返回导线。
具体实施方式
以下结合附图说明对本发明的实施例作进一步详细描述,但本实施例并不用于限制本发明,凡是采用本发明的相似结构及其相似变化,均应列入本发明的保护范围。
如图1所示为本发明实施例所提出的一种具有补偿功能的 ,包括磁铁组件I和传感器本体2两个部分组成。所述磁铁组件1活动安装于传感器本体2的外侧上,保留一个固定的距离,该距离一般为1mm-5mm,并且能磁铁组件I可以沿传感器本体2的轴向方向移动。
传感器本体2的结构组成如图2所示,所述传感器本体2由插座3、骨架4、补偿组件5、测量组件6、测量电路7、固定块9和外壳3组成。所述骨架4和固定块9分别固定于外壳3内壁的两端。所述骨架4上设有两个轴线相互平行的内孔,所述的测量组件6和补偿组件5分别固定于骨架6上的两个平行的内孔之中,如图3所示。测量组件6与补偿组件5的组成结构如图4所示。
所述的测量组件6由测量波导丝8、测量线圈16、保护套管10等组成。测量波导丝8 —端称为近端,另一端称为远端。测量波导丝8的近端安装于骨架4的一个内孔中,并经激励导线14与测量电路7连接。测量波导丝8的远端安装于固定块9上,并经过返回导线18连接到测量电路7中。补偿组件由补偿波导丝17和补偿线圈15组成。补偿波导丝17的近端安装于骨架4的另一内孔中,补偿波导丝17的远端悬空。
本发明的测量波导丝具有足够的长度,按照位移传感器的测量量程来确定,具体长度应大于量程,并留有一定余量,具体余量大小可根据实验测定后确定。例如,传感器测量量程为500mm,去余量约为50mm,则测量波导丝取为550mm。而补偿波导丝17的长度可以等于骨架4的长度。两根波导丝的轴线相互平行。
本发明的测量线圈16和补偿线圈15分别同轴绕设于骨架4上与本组件相对应的内孔的外周,两个线圈直接通过连接导线13直接相连,两个线圈的另一端并通过测量导线12以反向串联形式接入测量电路7。测量波导丝8的外周套设有保护套管10,保护套管10的一端与骨架4固接,另一端与固定块9固接。
本发明实施例工作时,由测量电路7产生的激励脉冲通过激励导线14加载到测量波导丝8上,从而产生一个垂直于测量波导丝8轴线的环形磁场。该环形磁场以光速沿测量波导丝8的轴向传递,当该环形磁场到达磁铁组件I所在位置时,与磁铁组件I产生的固有磁场相遇,二者的磁场矢量相叠加形成一个螺旋磁场,由此产生瞬时扭力,并在测量波导丝8上形成一个机械扭力波。该扭力波以超声速度沿测量波导丝8传递,在测量波导丝8的近端该扭力波由测量线圈16拾取后,转换为对应的感应脉冲。测量电路7通过测量出激励脉冲与扭力波返回产生的感应脉冲之间的时间差,就可以精确地计算出磁铁组件I与测量线圈16之间的绝对距离,从而可以实现定位磁铁组件I的绝对位移大小的测量。
本发明实施例中,由于测量线圈16与补偿线圈15的参数完全相同,测量波导丝8与补偿波导丝17长度不同,其他参数完全相同,所以在同一时刻测量线圈16和补偿线圈15受到外界空间的电磁干扰(例如:来自外部空间的电磁干扰,或由内部电源波动、波导丝振动等因素所产生的噪声)是完全相同的。由于测量线圈16和补偿线圈15是反向串联的,即二者构成差动形式,这将使得两个线圈的感应脉冲输出信号直接相减。因此,两个感应线圈输出的总输出信号中干扰与噪声会显著降低,从而显著提高检测精度和抗干扰能力。
尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
Copyright © 2018 地址:深圳市宝安区松岗街道红星社区宏海大厦5楼 备案号:粤ICP备19052563号 网站地图(百度 / 谷歌)
技术支持: [ ]