垃圾压缩机控制系统是为实现垃圾密闭式垃圾压缩转运而设计,垃圾压缩机控制系统通过控制推料机向压缩机内推料,推料到一定量后压缩机开始向压缩腔或垃圾箱内压料,压料后退回,如此往复,直到压缩机压料达到设定压力即认为垃圾箱已压满,压缩机关闭箱门,压装完成。这种控制系统容易导致垃圾量控制不好出现压多装多或者亏载现象。因此,为了避免现有技术中存在的缺点,提供一种提高垃圾压缩重量和体积精度控制的预压滤水式垃圾压缩机控制系统。
相对于现有技术,该控制单元通过收集重量传感器组、位移传感器组及压力变送器组的数据信息来控制油缸组的工作状态,实现对压缩机和推料机的工作控制,有效控制垃圾压缩重量和体积精度。
附图说明
图1为控制原理图;
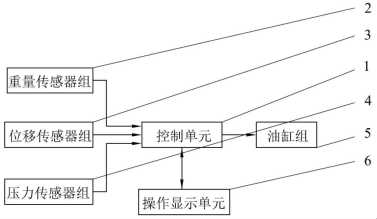
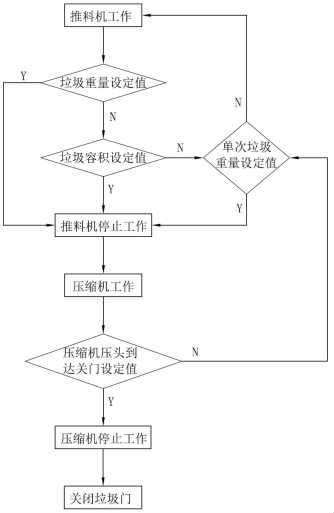
图2为控制流程图。
图中:1-控制单元;2-重量传感器组;3- 组;4-压力变送器组;5-油缸组;6-操作显示单元。
具体实施方式
如图1和图2所示本实用新型的一种预压滤水式垃圾压缩机控制系统,包括控制单元1、重量传感器组2、 组3、压力变送器组4、油缸组5及操作显示单元6。
重量传感器组2安装于压缩机上且与控制单元1电连接。重量传感器组2包括四个重量传感器,该四个重量传感器分别安装于压缩机的底部。
组3分别安装于压缩机上且与控制单元I电连接。 组3包括六个位移传感器,该六个位移传感器分别安装于压缩机的内侧壁,用于检测压缩机压头的位移量。
压力变送器组4安装于油缸组5上且与控制单元1电连接,便于控制压头压力,提高对垃圾装载量的控制。
操作显示单元6与控制单元I电连接,显示相关的操作工作状态信息。
油缸组5分别与控制单元I电连接。油缸组5包括压缩机油缸和推料机油缸。压缩机油缸的每次工作时间为3〜5分钟,便于过滤水份。当然,压缩机油缸的每次工作时间可根据需要进行调整。压缩机油缸和推料机油缸轮流工作次数为三次,便于垃圾压缩重量和体积控制,提高压缩比。
控制单元1通过收集重量传感器组2、位移传感器组3及压力变送器组4的数据信息来控制油缸组5的工作状态,实现对压缩机和推料机的工作控制。
工作原理:根据重量传感器组2数据判断垃圾箱装载重量是否达到上限设定值,当下料量达到此值时,不再下料,控制装载不会超重;根据 组3数据判断垃圾箱容积是否达到上限设定值,当下料量大于垃圾箱的有效装载容积时,不再下料,控制垃圾总量不超过最大有效容积,保证垃圾箱能装下垃圾,箱门能顺利关闭,不会产生垃圾外挂;垃圾箱装载分三次进行,每次压缩三分之一,有利于提高压缩比,保证压缩过滤水的效果,便于检测重量容积比,从而控制垃圾箱总的重量和容积。
Copyright © 2018 地址:深圳市宝安区松岗街道红星社区宏海大厦5楼 备案号:粤ICP备19052563号 网站地图(百度 / 谷歌)
技术支持: [ ]